Роботы своими руками на микроконтроллере
")
Плавающий робот из бутылок своими руками
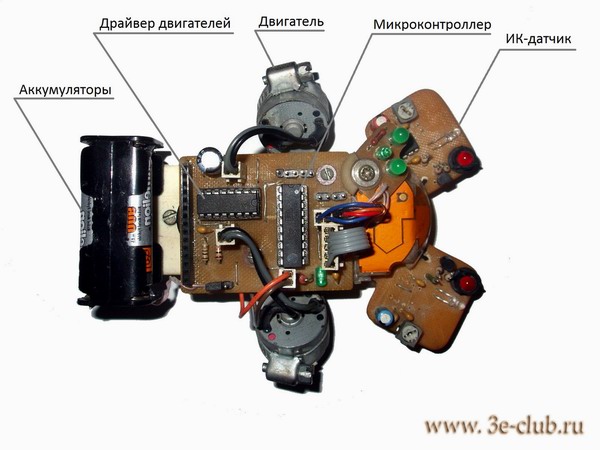
В данной статье представлен проект самодельного простого робота пылесоса на микроконтроллере Atmega8. Конечно идеально чистой он вашу квартиру не сделает но пыли и мелкого мусора чуток соберет. Ориентация в пространстве, если конечно это можно так назвать, осуществляется при помощи кнопок расположенных в передней части робота - это своего рода зрение робота. Как только на пути робота появляется препятствии кнопка замыкается и сигнал поступает в микроконтроллере который в свою очередь меняет направление движения робота.

")






![[микроконтроллеры]](https://img.brodude.ru/WeulA66NpdThzBlG3suUegR5ThtcauFCnE0spvwcGUs/rs:fill:1090:600:0/g:ce:0:0/c:0:0/aHR0cHM6Ly9icm9kdWRlLnJ1L3dwLWNvbnRlbnQvdXBsb2Fkcy8yMDE5LzAzLzI2L2Jyb2R1ZGUucnVfMjYuMDMuMjAxOF9kc0c3V3RUbmlHNEJ0LnBuZw)
Укр Рус. Сравнение Добавьте товары для сравнения. Желания Добавьте товары в желания. Перезвонить вам? Укажите ваш номер телефона и имя.
- Для того чтобы сделать первого из них, достаточно укрепить на шасси робота цветной маркер, касающийся поверхности, по которой движется робот, и поставить робота на лист ватмана. Циклоидные рисунки такого арт-робота будут зависеть от написанной вами программы и, конечно же, вашей фантазии.
- Поиск Написать публикацию. Время на прочтение 8 мин.
- Как сделать робота в домашних условиях своими руками.
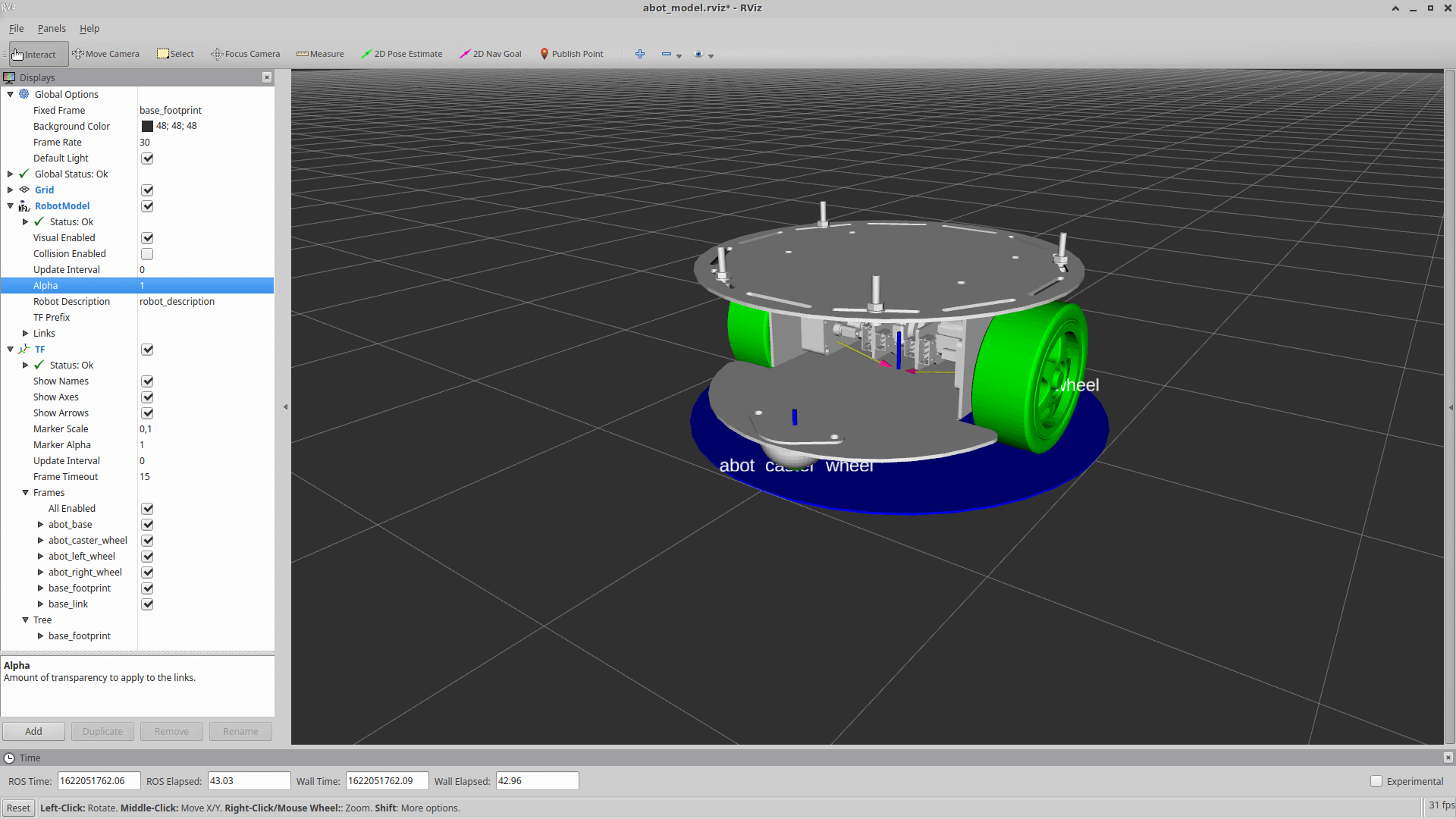
- Оглавление: Шасси Мозги Программа.
- Software Developer. Поиск Написать публикацию.
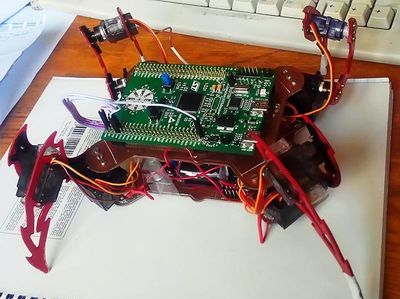
- Наконец-то я получил долгожданный набор механических деталей для робота-паука.
- В приведенной схеме рекомендуется использовать электродвигатели с током потребления до мА и напряжением питания В. При использовании более мощных моторов рекомендуется применить раздельное питание электронной схемы и электродвигателей, а также предусмотреть меры по стабилизации работы микроконтроллера.
- Полезные статьи.
- Главная страница. Простой робот с логической микросхемой.
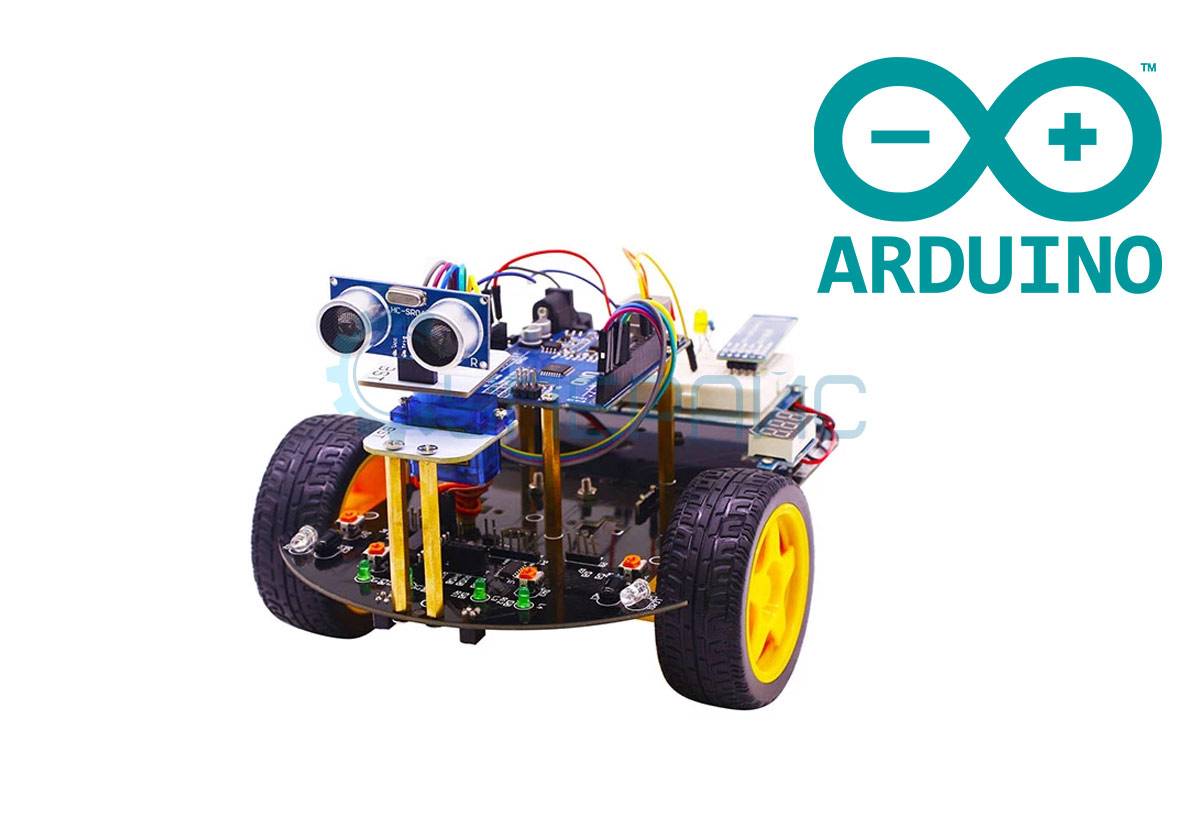
![Робот своими руками - [микроконтроллеры]](https://top3dshop.ru/image/data/articles/reviews_6/arduino-cnc-machine/image8.jpg)

В этой статье описано строительство плавающего робота из доступных материалов. Также эта статья является хорошим примером повторного использования бутылок от воды. Я использовал два бутылки от воды, полиморфный пластик, два двигателя с винтами, изоленту, корпус, батарею и motoruino клон Arduino предназначенный для работы с двигателями, сервоприводами и датчиками. Необходимые материалы: Две бутылки от воды Два двигателя постоянного тока Два винта Изолента Корпус Motoruino или любой другой микроконтроллер и драйвер двигателя с H-мостом Аккумулятор.